
Trong hướng dẫn này mình sẽ hướng dẫn cách thêm thư viện này vào Proteus. Thư viện được thiết kế bởi theengineeringprojects.
Thư viện GPS cho Proteus mà bạn có thể dễ dàng mô phỏng mô-đun GPS của mình trong Proteus và có thể thiết kế mã của bạn cho Arduino, vi điều khiển PIC hoặc 8051.
Mô-đun GPS thiết kế cho Proteus là một GPS đơn giản có các chân TX và RX và khi bạn bắt đầu mô phỏng, mô-đun này sẽ bắt đầu gửi dữ liệu NMEA trên chân TX của nó, bạn có thể dễ dàng kiểm tra bằng cách sử dụng Virtual Terminal. Mình sẽ chỉ cho bạn cách kiểm tra nó trong bài viết hôm nay. Một điều quan trọng khác, rõ ràng là trong Mô phỏng Proteus, chúng ta không thể nhận được các giá trị thực tế của kinh độ, vĩ độ, v.v., vì vậy trong mô hình, mình đã sử dụng các giá trị giả chotất cả các dữ liệu này. Lợi ích của mô-đun này là bạn có thể dễ dàng thiết kế mã cho GPS và có thể kiểm tra nó trong mô phỏng của bạn. Thêm vào đó, thiết kế của nó cũng rất mới mẻ.
Trước hết, hãy nhấp vào nút bên dưới và tải xuống Thư viện GPS cho Proteus.
----------------------------------------------
----------------------------------------------
Sau khi tải xuống, bạn sẽ nhận được một tệp zip chứa ba tệp trong đó như sau:
GpsTEP.LIB
GpsTEP.IDX
GpsTEP.HEX
Đặt các tệp này vào thư mục Thư viện của phần mềm Proteus của bạn bằng cách giải nén các tệp này và đặt chúng trong thư mục theo đường dẫn sau: C:\ProgramData\Labcenter Electronics\Proteus 8 Professional\LIBRARY với win 32 bit hoặc C:\ProgramData(x86)\Labcenter Electronics\Proteus 8 Professional\LIBRARY với win 64 bit.
Bây giờ hãy mở phần mềm Proteus của bạn, nếu bạn đã mở rồi thì hãy khởi động lại phần mềm Proteus của bạn.
Tiếp đến trong danh sách thư viện, hãy tìm kiếm Mô-đun GPS và đặt nó vào không gian làm việc của bạn.
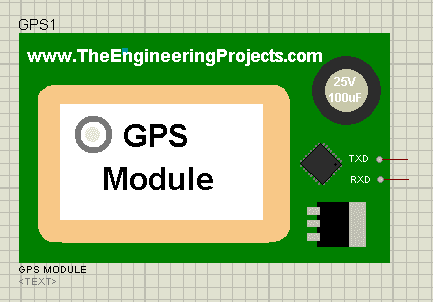
Nếu mọi thứ đều ổn thì bạn sẽ nhận được mô-đun của mình như thể hiện trong hình bên dưới:
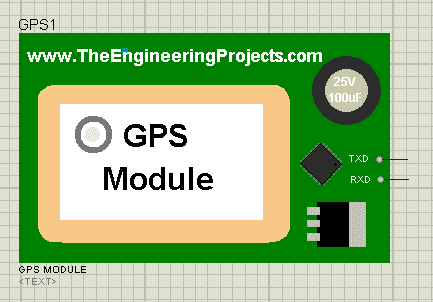
Như bạn có thể thấy trong hình trên, nó có tổng cộng hai chân là TX và RX.
Bây giờ nhấp đúp vào mô-đun GPS này và bạn sẽ đến các thuộc tính của nó như thể hiện trong hình dưới đây:
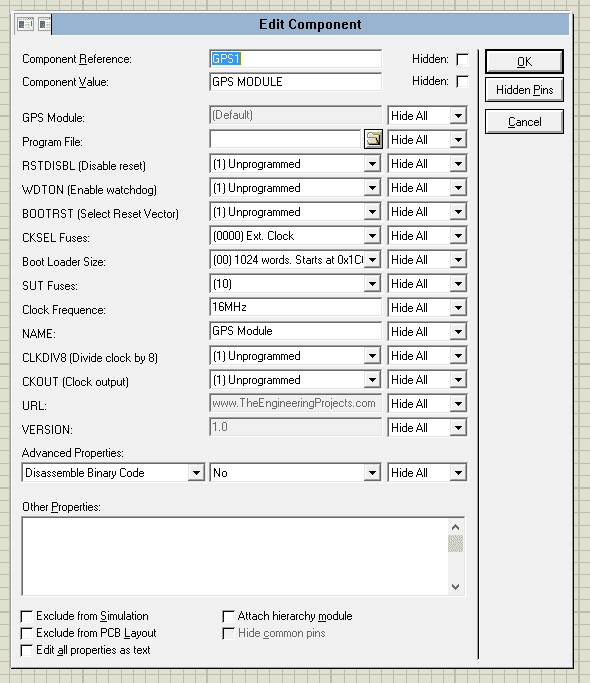
Bây giờ, điều cuối cùng bạn cần làm là tải lên tệp GpsTEP.HEX , mà bạn đã có
trong tệp zip đã tải xuống, trong phần Tệp Chương trình .
Tệp GpsTEP.HEX này rất cần thiết cho mô hình này vì nó bổ sung chức năng của
GPS trong mô hình này.
Vì vậy, sau khi thêm liên kết của tệp GpsTEP.HEX trong phần Tệp Chương trình,
bây giờ mô-đun Gps của bạn đã sẵn sàng để sử dụng trong mạch của bạn.
Vì vậy, bây giờ chúng ta hãy thêm một thiết bị đầu cuối ảo và kiểm tra đầu ra
của Mô-đun GPS này. Nếu bạn chưa làm việc trên Virtual Terminal trước đó thì
bạn nên đọc -----Cách sử dụng Virtual Terminal trong Proteus ISIS.
Thiết kế một mạch nhỏ như hình bên dưới:

GHI CHÚ:
Tốc độ truyền của Mô-đun GPS này là 9600.
Dữ liệu được gửi bởi mô-đun GPS này là giả vì chúng tôi không thể lấy các giá trị này trong mô phỏng.
Bây giờ, hãy chạy mô phỏng và kiểm tra Virtual Terminal và nếu mọi thứ không xảy ra lỗi thì bạn sẽ nhận được kết quả như trong hình bên dưới:

Dòng đầu tiên chỉ là phần giới thiệu cho mô-đun này và sau đó bạn sẽ bắt đầu nhận dữ liệu ở định dạng NMEA.
Dữ liệu NMEA sẽ không đổi nhưng sẽ tiếp tục truyền.
Bây giờ, thay vì sử dụng Virtual Terminal này, bạn có thể sử dụng bất kỳ vi điều khiển nào ở đây như Arduino, PIC Microcontroller hoặc 8051 Microcontroller, v.v. và có thể viết mã của bạn một cách dễ dàng và kiểm tra nó.
Post a Comment